Obviously, an electric motor is quieter in the air than its internal combustion engine equivalent, but what about beneath the surface? And to what extent? And what are the impacts on marine wildlife? Having dived deeper into these questions, we found a lack of comparative data, especially for recreational boating.
At TEMO, we wanted to investigate further and gain a better understanding of the subject. Our goal has been to improve our knowledge of noise emissions (both internal combustion and electrical) and identify ways to reduce them for our future developments, with one ultimate aim: to limit our acoustic impact on the marine environment to an absolute minimum. With this in mind, research has been carried out within TEMO and in partnership with Ensta, one of France’s top engineering schools.
Underwater Noise Pollution: A reality that we should hear a lot more about
The subject is as fascinating as it is complex: it is a discipline in itself. We find waves, formulas, scientific knowledge, and a wealth of biodiversity. In the boating world, our engines contribute to anthropogenic noise: a disharmonious sound produced by human activity. Logically, our immersion begins with measuring the emissions of our motors and their internal combustion equivalents.
Scientific Diving with ENSTA Bretagne
The experts from ENSTA helped us refine what turned out to be a huge undertaking. Measuring and analyzing sounds, especially in an aquatic environment, is something that can’t be improvised. The lecturer-researchers at this renowned university, which is a member of the Paris Institute of Technology, are experts in their field.

In June 2024, on Brittany’s Lake Guerlédan, they made and analyzed our first recordings, which were refined in-house over the course of the following winter. At the same time, we gathered as much ethological knowledge as possible.
Following long and patient analysis, the sound waves were gradually transformed into numbers, then into curves: we finally had robust elements of comparison within a well-defined reference framework.
Ethology? It’s the study of animal behavior. If we make noise, we need to understand why and how it can be disruptive to other species. And we are fortunate in France to have a good pool of experts: there were already plenty of French works to read!
The “Superpower” of Sound
Let’s take a moment to review the specific characteristics of aquatic environments for sound propagation: acceleration, greater distance, and strong dependence on environmental parameters. For underwater life, in the absence of light, acoustics are a universal and vital tool. They allow organisms to navigate, hunt, and detect danger.
The density of the aquatic environment favors the transmission of energy from one organism to another and the propagation of low-frequency waves. When you put your head under water, you can hear sounds that are farther away and more clearly, long before you can perceive them in the air. It’s almost like a “superpower.”

From Waves to Behavior: The wave of life
At this stage, to fully understand the potential impacts of anthropogenic noise on wildlife, we needed to leave our human frame of reference behind. This is the subject of ethologists, whose patient research has established audiograms for different marine species: mammals, of course, but also fish, mollusks, and other invertebrates. Human auditory perception ranges from approximately 20 Hz to 2 kHz. Mammals, unsurprisingly, are somewhat similar to us. Among them, the various toothed whales, including the iconic bottlenose dolphin, use vocalizations between 0.2 and 50 kHz for social interaction. The echolocation clicks they use to navigate (which could be likened to our sonar) use a frequency band between 40 and 150 kHz. This is a very wide range of perception that far exceeds human capabilities. Fish, on the other hand, interact mostly at frequencies below 1 kHz. These details help us understand that the same sound wave will impact different species differently depending on their hearing ability.

Masking: The main impact of recreational boating
There are also several types of noise impact: for recreational boating, masking is the most significant. This corresponds to the “interference” caused by anthropogenic noise on the frequencies used by species to communicate or for auto-location purposes. The sounds that are masked are no longer perceptible to the species. This masking can cause vital behavioral disturbances, particularly in terms of reproductive success and social cohesion, which can ultimately harm the health of a population through a decline in demographics and the survival of young individuals (Gallagher et al., 2021; Mortensen et al., 2021).
Acoustic Measurement Indicators
In underwater acoustics, there are many indicators for quantifying sound levels. Sound pressure levels are measured in dB SPL re1µPa@1m. Based on a logarithmic scale (decibels), the ratio between a measured sound pressure (in Pa) at 1m from its source (@1m) and a reference (1µPa, the human hearing threshold underwater) is represented. The decibel scale allows large differences in amplitude to be represented. A variation of 20 dB represents a wave that is 10 times louder, while 40 dB represents a wave that is 100 times louder. With this in mind, we chose the speed of the dinghy we used as a basis for comparison. This means that the measured sound level differences correspond to the same use of the motor.
Quantifying Noise Using Spectral Density
The most relevant representation in our case is spectral density. It allows us to display a sound level for a given frequency. We chose to construct curves over a frequency band between 180 Hz and 45 kHz. This method is particularly useful for determining which frequencies are the loudest.
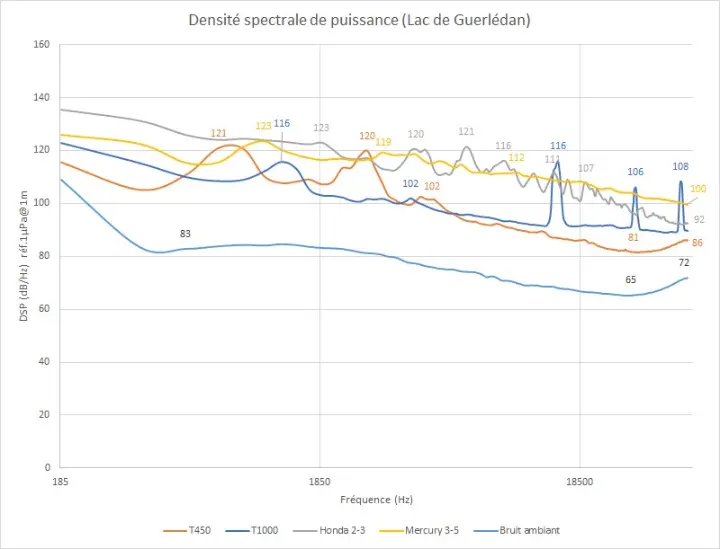
Figure 1: Spectral density of the four engines measured (TEMO study)
Electric versus Internal Combustion: What do the measurements tell us?
The first observation is that internal combustion engines contribute more noise and in a more consistent manner. Regardless of the frequencies, their sound levels are stable and higher. For electric motors, the contributions are more attributable to specific frequency ranges. Next, although the average differences are less striking than in the air, they average around 10 dB SPL, which means that internal combustion engines are five times louder. To try to compare this, it would be the difference between a quiet restaurant and a classroom full of noisy schoolkids! The differences are more noticeable at low frequencies and tend to narrow at high frequencies.
Electric motors are generally quieter, with occasional contributions
For electric motors (and particularly the TEMO·450), bumps appear below 2 kHz, with peaks that can occasionally match those of internal combustion engines. These can probably be attributed to the propellers. High-frequency spectral lines appear on the TEMO·1000 spectrum. At three distinct and precise frequencies, their noise level reach or exceed that of internal combustion engines. These can be attributed to the power electronics (PWM for Pulse Width Modulation) that allow the engine speed to be varied.
Overall, stronger masking of low-frequency communications for internal combustion engines.
A higher overall noise level, particularly at low frequencies: this is the conclusion that can be reached from the noise emissions of the internal combustion engines we tested. As low frequencies propagate better, this contribution over a wide spectrum will mask more frequencies that are used by wildlife, and over a wider area. This is the general conclusion that can be drawn from these results. The values recorded for these low-power motors (electric and internal combustion engines combined), even allowing for instrument error, do not appear to be sufficient to cause injury to wildlife, even temporarily. Their impact is more behavioral. A few species can be targeted, but it is difficult to identify specific impacts, as there are also interactions and the disturbance of certain species can upset the balance of an ecosystem. Our study did not go that far.
Results Confirmed by Two European Studies
Although few experiments directly compare internal combustion and electric propulsion, recent studies have obtained broadly similar results. This is the case in publications by Aradi et al. in May 2024 and Gaggero et al. in February 2024. The former observed an average difference of 10-15 dB SPL, while the Italian study found a difference of 5-7 dB in its case study (two Torqeedo electric outboards versus a 40 hp outboard motor).
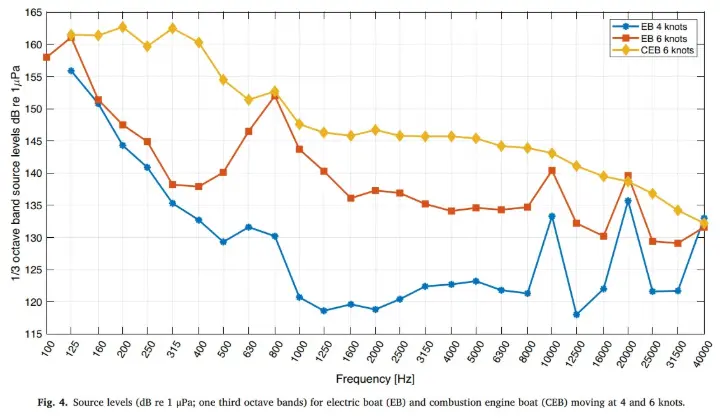
Figure 2: Sound level for electric boats (EB) and combustion-engined boats (CEB) traveling at 4 and 6 knots (Gaggero et al., 2024)

The Italian study proposes a masking model for two species (the cormorant and the bottlenose dolphin).
In any case, the authors emphasise that electric motors contribute significantly less at low frequencies and emit high-frequency lines due to MLI.
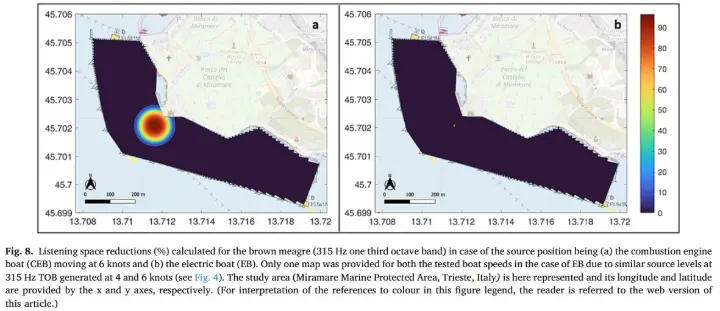
Figure 3: Masking perimeter calculated for the cormorant (third octave band 315 Hz) (Gaggero et al., 2024)
- a: internal combustion engine
- b: electric motor
Our own measurements also show a rapid attenuation of sound emissions from electric motors: at 30 meters (100 feet), they can only be distinguished from ambient noise on a few frequencies, unlike internal combustion engines, which remain largely audible. Their results are consistent with this, showing reduced impact perimeters for electric motors (Figure b).
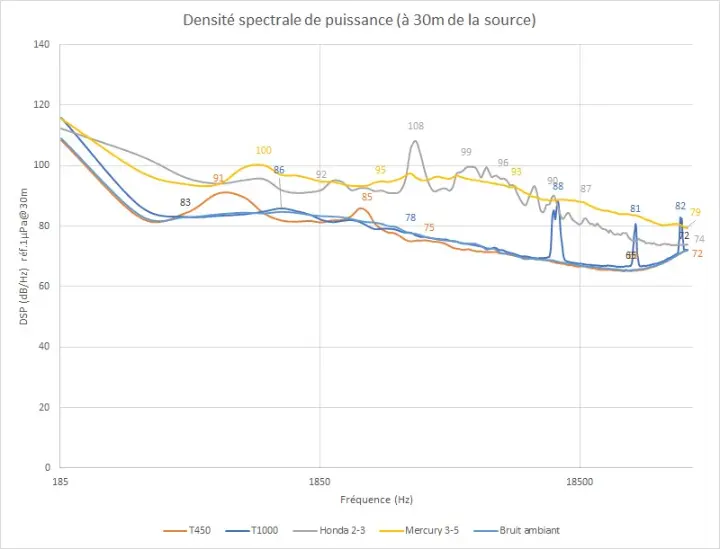
Figure 4: Spectral density of the four engines, measured 30 m from the source (TEMO study)
The contribution of electric motors to reducing anthropogenic noise and its impacts is therefore largely positive, as also shown by an Australian comparative study between an electric ferry and a conventional ferry (Parsons et al., 2020). However, new impacts specific to certain species, and caused by PWM, must continue to be studied in detail. Above all, this aspect must be included in our specifications in order to continue and amplify impact reductions and become one of the major challenges for our engineering teams, along with propeller design.
Motors Adapted to Real-world Applications
These results alone also mask another reality that the logistics of our tests have reminded us of. Typical uses in boating are short trips (going ashore, for example), coastal fishing, and short excursions under power. In all of these cases, approach maneuvers are performed regularly, most of the time at low speed, and there are regular periods of just drifting, but with the engine running.
All of these use cases fully justify the use of electric motors, as they not only allow the technical advantages of the motors to be exploited, but also represent the situations in which the differences in noise emissions between the two technologies will be most noticeable:
- No noise when the electric motor is stopped
- Very low noise from the electric motor at low speeds (approach maneuvers)
- Difference in propulsive efficiency at low speeds between the two technologies, resulting in greater reduction of vibration in these operating ranges. The maximum torque directly available from electric motors delays the onset of propeller cavitation.
The Results and One Ambition
While our own measurements and existing studies have confirmed our intuitions and the validity of developing electric technology, they have also highlighted its current limitations and areas for improvement. We have grown from this study, which reminds us of the extent of marine biodiversity and the responsibility that we have: We are merely guests on the oceans. This knowledge compels us to act.
No challenge is insurmountable if we pursue the right goal. And at TEMO, our goal is to continue reducing our impact. To achieve this, we’ve identified two key areas of focus:
- To continue our efforts to raise awareness of the impacts of recreational boating and the ways to reduce them.
- To integrate underwater noise into our environmental challenges.
For the latter, we’ve begun mobilizing our design team to pursue noise reduction objectives not just for power electronics, but also for propeller design. The challenge is immense and goes beyond the simple success of TEMO. That is why we also hope that this article will serve as a call to all those who wish to work towards this goal, and perhaps even as an opportunity to create an industrial collective motivated to achieve these objectives.
Alone, we go faster. Together, we go further: Let’s hasten slowly!
Speed is none of our business, cooperation is.