Es de conocimiento público que un motor eléctrico es más silencioso en el aire que su equivalente térmico. Pero, ¿qué ocurre bajo el agua? ¿En qué medida? ¿Y qué impacto tiene en la fauna? Cuando se profundiza en el tema, se observa una falta de datos comparativos, especialmente en lo que respecta a la navegación de recreo.
Chez TEMO, nous avons voulu comprendre et mieux appréhender le sujet. Notre but est d’améliorer nos connaissances des émissions sonores (thermiques et électriques) et identifier les pistes de réduction pour nos futurs développements, avec une finalité : limiter au strict minimum notre impact acoustique sur le milieu marin. Dans cette perspective, un travail de recherche a été mené au sein de TEMO et en partenariat avec l'ENSTA Bretagne (École Nationale Supérieure des Techniques Avancées Bretagne).
La pollution sonore sous-marine : une réalité qui fait plus de bruit qu'il n'y paraît.
Le sujet est aussi passionnant que complexe : c’est une discipline en soi. On y rencontre des ondes, des formules, des puits de sciences et un florilège de biodiversité. Dans cet univers, nos moteurs font partie du bruit anthropique : un son sans harmonie issu d’une activité humaine. En toute logique, notre immersion commence par la mesure des émissions de nos moteurs et de leurs équivalents thermiques.
Plongée scientifique avec l’ENSTA Bretagne
Place aux experts, ceux de l’ENSTA, qui nous ont permis de dégrossir un travail qui s’est révélé d’ampleur. Mesurer et analyser des sons, particulièrement en milieu aquatique, ne s’improvise pas. Les enseignants chercheurs de cette école d’ingénieur reconnue, membre de l’institut polytechnique de Paris, maitrise parfaitement leur sujet.

En juin 2024, au lac de Guerlédan, ils réalisent et analysent nos premiers enregistrements, affinés en interne au cours de l’hiver sui-vant. En parallèle, nous répertorions le plus de connaissances éthologiques possible.
Après un long et patient travail d’analyse, les ondes sonores se sont progressivement transformées en chiffres, puis en courbes : nous tenions enfin des éléments de comparaison robustes, au sein d’un référentiel bien défini.
Ethologie ? C’est l’étude comportemental des espèces. Si on fait du bruit, il faut comprendre pourquoi et comment ça peut être perturbant pour les espèces. Et nous avons la chance, en France, d’avoir une bonne batterie d’experts : rien qu’en langue française, il y avait déjà de quoi lire !
Le "super pouvoir" du son
Revenons une seconde sur les caractéristiques spécifiques des milieux aquatiques pour la propagation du son : accélération, distance plus étendue, forte dépendance aux paramètres du milieu. Pour la vie sous-marine, en l’absence de lumière, l’acoustique est l’outil universel et vital.
Il permet de se repérer, de chasser, de détecter les dangers. La densité du milieu aqueux favorise la transmission d’énergie de proche en proche et la propagation des ondes basses fréquences. En mettant la tête sous l’eau, vous entendrez des sons plus lointains, plus nettement, et bien avant de les percevoir dans l’air. On dirait presque un « super pouvoir ».

De l’onde au comportement : la vague de la vie
A ce stade, pour bien comprendre les impacts potentiels des bruits anthropiques sur la faune, il est nécessaire de quitter nos repères humains. C’est l’objet des éthologues, dont le patient travail de recherche a permis d’établir des audiogrammes pour les différentes espèces marines : mammifères bien sûr, mais également poissons, jusqu’aux mollusques et autres invertébrés. La perception auditive des humains s’établit entre 20 Hz et 2 kHz environ. Les mammifères, sans surprise, nous ressemble un peu. Parmi eux, les odontocètes, dont l’emblématique grand dauphin, utilisent pour leurs interactions sociales des vocalises émises entre 0.2 et 50 kHz. Les clics d’écholocation qui leur servent à se repérer (et que l’on pourrait assimiler à nos sonars) utilisent pour leur part une bande de fréquence comprise entre 40 et 150 kHz. Une gamme de perception très large qui dépasse de loin les capacités humaines. De leur côté, les poissons interagissent pour la plupart dans des fréquences inférieurs à 1 kHz. Ces précisions permettent de comprendre qu’une même onde sonore impactera différemment les espèces en fonction de leur capacité auditive.

Le masquage : principal impact de la navigation de plaisance
Il existe aussi plusieurs types d’impact du bruit : pour la navigation de plaisance, le masquage est le plus conséquent. Il correspond au « parasitage » par le bruit anthropique des fréquences utilisées par les espèces pour communiquer ou se repérer. Les sons couverts ne sont plus perceptibles par les espèces. Ce masquage peut induire des perturbations comportementales d’ordre vital, notamment, le succès reproducteur et la cohésion sociale, pouvant à terme porter atteinte à la santé d’une population, par une baisse de la démographie et de la survie des jeunes (Gallagher et al., 2021 ; Mortensen et al., 2021).
Les indicateurs de mesure en acoustique
En acoustique sous-marine, il existe de nombreux indicateurs pour quantifier les niveaux sonores. Les niveaux de pression acoustique (Sound Pressure Level) se mesurent en dB SPL re1μPa@1m. Sur la base d’une échelle logarithmique (les décibels), on représente le rapport entre une pression acoustique mesuré (en Pa) à 1m de sa source (@1m) et une référence (1μPa, seuil d’audition de l’humain sous l’eau). L’échelle des décibels permet de représenter de grands écarts d’amplitude. Une variation de 20 dB représente une onde 10 fois plus forte, 40 dB une onde 100 fois plus forte. Ceci étant posé, nous avons choisi comme base de comparaison la vitesse de l’annexe que nous avons utilisé. Ainsi, les écarts de niveau sonore mesurés correspondent bien au même usage du moteur.
Quantifier les bruits grâce à la densité spectrale
La représentation la plus pertinente dans notre cas est celle de la densité spectrale. Elle permet d’afficher un niveau sonore pour une fréquence donnée. Nous avons choisi de construire des courbes sur une bande de fréquence comprises entre 180 Hz et 45 kHz. Cette méthode est particulièrement pertinente pour déterminer quelles sont les fréquences les plus sonores.
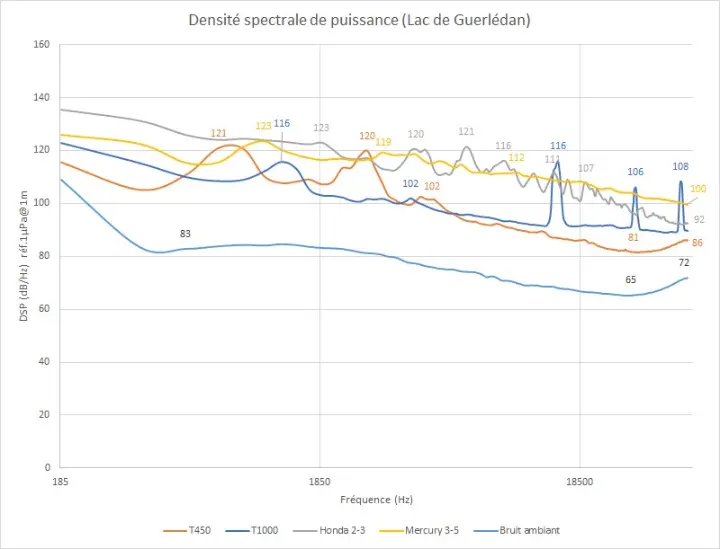
Figure 1 : Densité spectrale des 4 moteurs mesurés (Etude TEMO)
Electrique versus thermique, que nous apprennent les mesures ?
La première observation est la contribution au bruit plus forte et homogène des moteurs thermiques. Quel que soit les fréquences, leurs niveaux sonores sont stables et plus élevés. Pour les moteurs électriques, les contributions sont davantage attribuées à des gammes de fréquences spécifiques. Ensuite, si les écarts moyens sont moins flagrants qu’en aérien, ils s’établissent en moyenne autour de 10 dB SPL, ce qui signifie un son 5 fois plus fort pour les moteurs thermiques. Pour tenter une comparaison, ce serait la différence entre un restaurant paisible et une salle de classe bruyante ! Les écarts sont plus sensibles dans les basses fréquences et ont tendance à se resserrer dans les hautes fréquences.
En électrique, des moteurs globalement plus silencieux et des contributions ponctuelles
Pour les moteurs électriques (et particulièrement le T450), des bosses apparaissent en dessous de 2 kHz, avec des pics pouvant ponctuellement égaler les moteurs thermiques. Ils sont probablement attribués à l’hélice. Des raies spectrales en haute fréquence apparaissent sur le spectre du T1000. Sur 3 fréquences distinctes et précises, leur niveau sonore atteint ou dépasse celui des thermiques. Elles sont attribuées à l’électronique de puissance (MLI pour Mo-dulation de Largeur d’Impulsion) qui permet de faire varier la vitesse du moteur.
Au bilan, un masquage des communications en basse fréquence plus fort pour les moteurs thermiques
Un niveau sonore globalement plus élevé, particulièrement en basse fréquence : c’est le bilan que l’on peut faire des émissions sonores des moteurs thermiques que nous avons testé. Les basses fréquences se propageant mieux, cette contribution sur un large spectre va masquer davantage de fréquences utiles à la faune, et sur un périmètre plus large. C’est la conclusion générique que l’on peut faire de ces résultats. Les valeurs constatées pour ces moteurs de petites puissances (électriques et thermiques confondus), même en leur attribuant une erreur instrumentale, ne semblent pas suffisantes pour provoquer des lésions chez la faune, même temporaire. Leur incidence est davantage comportementale. On peut cibler quelques espèces, mais il est difficile d’affirmer des impacts précis, car il existe aussi des interactions et le dérangement de certaines espèces peut remettre en question l’équilibre d’un écosystème. Notre étude ne porte pas aussi loin.
Des résultats confirmés par deux études européennes
Bien que peu d’expériences comparent directement motorisation thermique et électrique, des études récentes obtiennent des résultats assez proches. C’est le cas des publications de Aradi et al en mai 2024, et Gaggero et al en février 2024. Les premiers observent un écart moyen de 10-15 dB SPL, tandis que l’étude italienne obtient 5-7 dB d’écart pour son cas de figure (2 mo-teurs Torqueedo versus un Hors-bord de 40 CV).
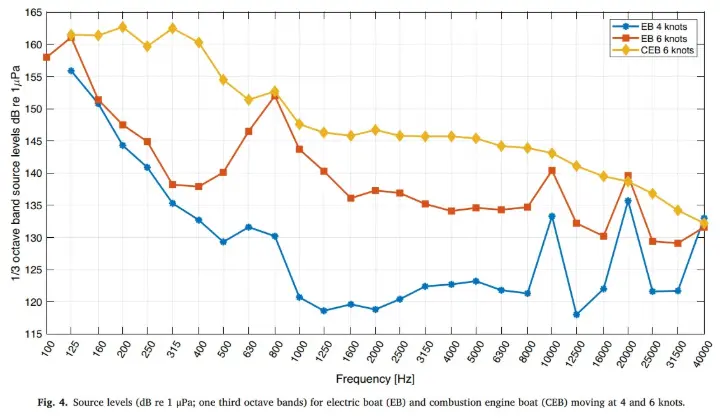
Figure 2 : Niveau sonore pour bateau électrique (EB) et bateau à moteur thermique (CEB) se déplaçant à 4 et 6 nds (Gaggero et al., 2024)

L’étude italienne propose une modélisation du masquage pour deux espèces (le corb - espèce de poissons et le grand dauphin).
Dans tous les cas, les auteurs soulignent, pour les moteurs électriques, une contribution nettement moindre dans les basses fréquences et des émissions de raies hautes fréquences dû au MLI.
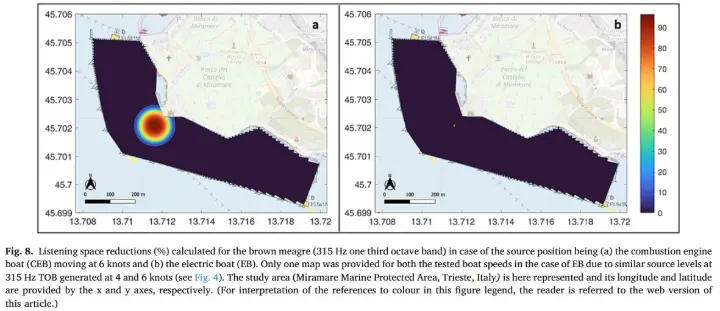
Figure 3 : Périmètre de masquage calculé pour le corb (bande de tiers d'octave 315 Hz) (Gaggero et al., 2024)
- a : moteur thermique
- b : moteur électrique
Nos propres mesures montrent aussi une atténuation rapide des émissions des moteurs électriques : à 30m, ils ne se distinguent du bruit ambiant que sur quelques fréquences, contrairement aux moteurs thermiques qui restent largement audibles. Leurs résultats vont dans le même sens en montrant des périmètres d’impact réduit pour les moteurs électrique (figure b).
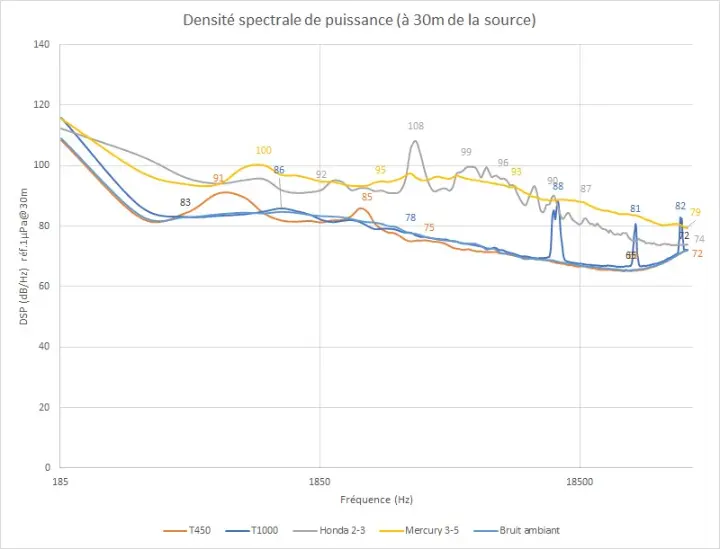
Figure 4 : Densité spectrale des 4 moteurs, mesurée à 30m de la source (Etude TEMO)
La contribution des moteurs électriques à la réduction du bruit anthropique et de ses impacts est donc largement positive, comme le montre également une étude comparative australienne entre un ferry électrique et un ferry classique (Parsons et al., 2020). Mais les nouveaux impacts spécifiques à certaines espèces et dus à l’électronique de puissance doivent continuer à être étudié en détail. Surtout, cet aspect doit rentrer dans nos cahiers des charges pour poursuivre et amplifier les réductions d’impacts et devenir un des défis majeurs de nos équipes d’ingénieurs, avec celui de la conception des hélices.
Des moteurs électriques adaptés aux usages réels
Ces résultats stricts masquent également une autre réalité que la logistique de nos tests nous a rappelé. Les cas d’usage typiques au nautisme sont ceux de déplacements courts (bateau-rivage), de la pêche côtière, et des excursions motorisées. Dans l’ensemble de ces cas d’usages, on effectue régulièrement des manœuvres d’approche, on évolue la plupart du temps à basse vitesse, et on observe des phases régulières de dérive avec le moteur en marche.
L’ensemble de ces cas d’usages justifie pleinement l’utilisation des moteurs électriques, car non seulement ils permettent de tirer profit des avantages techniques de la technologie, mais ils représentent également les situations dans lesquels les différences d‘émissions sonores des deux technologies seront le plus marquées :
- Absence de bruit à l’arrêt du moteur électrique;
- Bruit très faible de l’électrique à basse vitesse (manœuvres d’approche);
- Différence de rendement propulsif à basse vitesse entre les deux technologies générant une réduction de vibration plus importante dans ces plages d’utilisation. Le couple maximum directement disponible des moteurs électriques permettant de repousser l’apparition de la cavitation de l’hélice.
Des résultats et une ambition
Si nos mesures et les études existantes ont confirmé nos intuitions et le bien fondé de développer la technologie électrique, elles ont également pointé ses limites actuelles et les points d’amélioration. Nous sortons grandi de cet état de l’art qui nous rappelle toute la poésie de la biodiversité marine et la responsabilité qui nous incombe car sur les océans, nous sommes de simples invités. Cette connaissance nous oblige.
Aucun défi n’est insurmontable si l’on poursuit le bon objectif. Et celui que nous nous donnons chez TEMO, c’est de continuer à réduire nos impacts. Pour l’atteindre, nous avons identifié deux axes forts :
- Poursuivre notre effort de sensibilisation aux impacts de la navigation de plaisance et aux moyens de la réduire.
- Intégrer le bruit sous-marin à nos enjeux environnementaux.
Pour ce dernier axe, nous mobilisons notre bureau d’étude à poursuivre les objectifs de réduction de bruit pour l’électronique de puissance, mais aussi pour la conception des hélices. Le défi est immense et dépasse la simple réussite de TEMO. C’est la raison pour laquelle nous souhaitons aussi que cet article puisse être un appel à toutes les bonnes volontés souhaitant œuvrer en ce sens, et pourquoi pas l’occasion de créer un collectif industriel motivé à atteindre ces objectifs.
Seul, on va plus vite ; ensemble, on va plus loin ; hâtons-nous lentement !
Speed is none of our business, cooperation is.
This article is available in english.